The Never Ending Challenge
The nice thing about this project is that it is never finished! why is that? Imagine a drone that is able to independently search for a missing person. Completely autonomous. Such a drone would need a complete picture of the surroundings so that it can move safely in difficult terrain without accidents. Imagine a dense forest on a mountainside, in this environment the drone should now be able to locate, identify and provide help to a person without any assistance.
Sounds like science fiction? It is! But universities and large companies around the world are researching technologies that will one day make such drones a reality. There are already drones that can navigate in forests or inside buildings without GPS. 360 degree LIDAR systems together with cameras and compact computers with enormous computing power make it possible. Fast processors allow the calculation of new trajectories in fractions of a second, artificial intelligence helps to identify objects.
Stages of Evolution
The only sensible plan for such a complex project is: start as simply as possible and see how far you get!
Concepts and Requirements
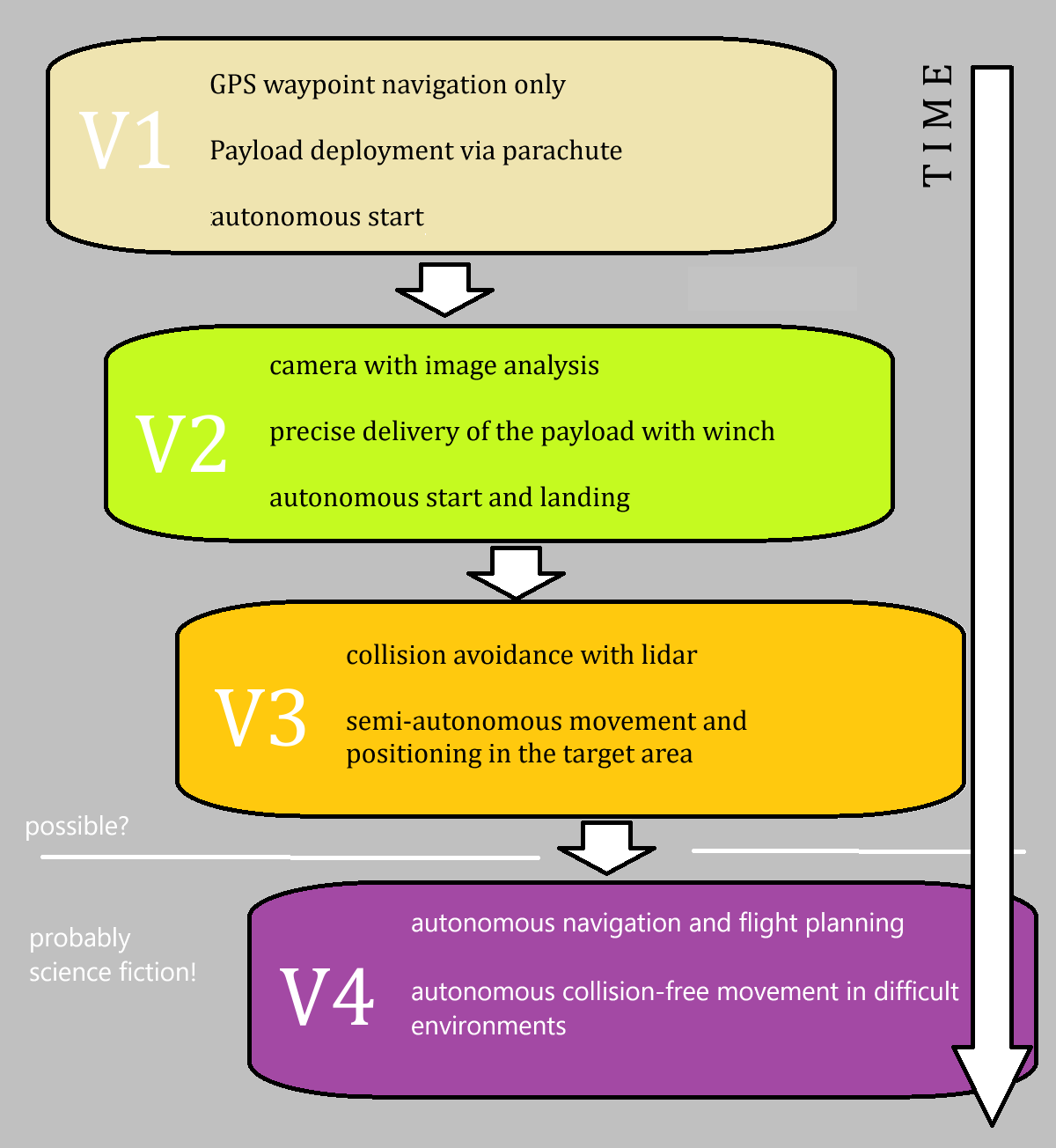
The technical concept represents a continuous development from version 1 to version 3. FAD V1 does not have its own intelligence, it simply flies a series of GPS waypoints and releases the payload at a defined point. FAD V2 is an interim solution: this drone will not carry any payload; this version is purely for the development and testing of camera-based search and obstacle avoidance. FAD V3 is the final prototype: this drone combines the sensor technology of the FAD V2 and can also carry a payload and be deployed at the smallest safe distance from the injured person.
FAD V1 • GPS based waypoint navigation • payload is dropped at the target position (parachute) • uses just a flight controller without companion computer • serves as initial prototype for further development
FAD V2 • camera for active search for injured persons • lidar for collision detection • no payload: focus is on active search! • utilizes a Raspberry Pi as companion computer • wireless transmission of waypoints • autonomous start and landing • video recording with automatic transmission
FAD V3 • camera for active search for injured persons • lidar for collision detection • payload bay and release mechanism • Longer flight time for extensive search operations